
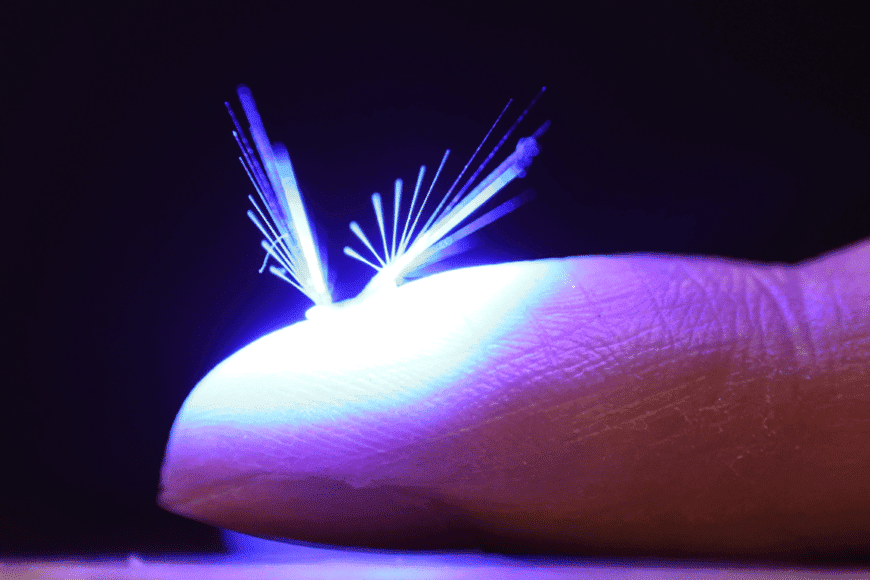
フィンランドのタンペレ大学の研究チームは、マックス・プランク知能システム研究所およびアールト大学の研究者とともに、インテリジェント材料で駆動し、光で制御して風に乗って飛行できるソフトミニロボット「FAIRY(Flying Aero-robots based on Light Responsive Materials Assemblyの略)」を開発した。このロボットは、タンポポの綿毛(種子)に着想を得ており、まさに外観もタンポポの綿毛そのものだ。主な違いは、小型ロボットの素材の形状を光で変化させ、その飛行に影響を与えることができる点だ。
インテリジェント材料は、人工のフェローが走ったり、泳いだり、跳んだりすることを可能にするロボットのアクチュエータを作るのに使われる。タンペレ大学の研究者たちは、これを飛行ロボットに応用し、Advanced Science誌に発表した研究『Dandelion-Inspired, Wind-Dispersed Polymer-Assembly Controlled by Light』で、インテリジェント材料を飛行させる方法を研究した。
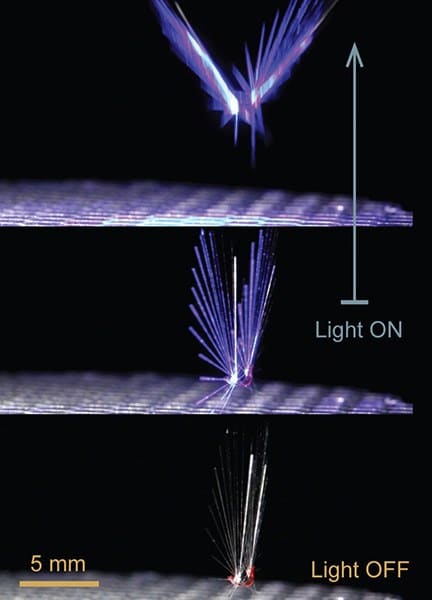
2021年9月から2026年までのFAIRYプロジェクトでは、感光性液晶ポリマーをアクチュエーターとする人工種子を作製した。タンペレ大学ライトロボット研究グループのHao Zeng氏は、このミニロボットについて、「綿毛は光によって刺激され、閉じたり開いたりすることができます。」と、説明する。
これは、重さ1.2mg、空隙率0.95という高い空力特性により、空中に浮き、風によって駆動することができるロボットなのだ。また、別の渦輪を安定的に発生させることで、より長い距離も風を利用した移動が可能である。ロボットは光源によって制御される。これはLEDでもレーザーでもいいとZeng氏は言う。形状を変えることで、風向きや強さを手動で調整することができる。さらに、離着陸の手順もこれを介して制御することができるという。
ただし、太陽光ではまだ使えないという。そこで研究者らは、日中も使えるように感度を上げることに取り組んでいる。また、ミニロボットを大型化し、GPSやバイオセンサーなどのマイクロエレクトロニクス機器を搭載して、環境調査にも利用できるようにする予定である。
さらに、このロボットは人工授粉にも応用できると考えている。このようなロボットを何百万台と送り出し、受粉が必要な農作物のある地域に向かわせることができる。このように、地球温暖化によってその存在が危ぶまれているミツバチなどの生物受粉媒介者を、ロボットが代行することができるのだ。
「SFのように聞こえますが、私たちが開発したロボットは、人工授粉に適した現実的な応用に向けた重要な一歩となることが、本研究に含まれる概念実証実験によって明らかになりました」とZeng氏は述べている。しかし、まだまだ未解決の部分がある。例えば、ロボットを目的地まで正確に誘導する方法や、ロボットを再利用する方法などが挙げられる。また、環境を汚染しないように、生分解性のあるロボットであることが必要だ。
「地球温暖化による花粉媒介者の減少は、生物多様性と食糧生産に対する深刻な脅威となっているため、これは世界の農業に大きな影響を与えるでしょう。」と、Zeng氏は述べている。
論文
- Advanced Science: Dandelion-Inspired, Wind-Dispersed Polymer-Assembly Controlled by Light
参考文献
- Tampere University: A fairy-like robot flies by the power of wind and light
- via Science Alert: Incredible ‘Fairy’ Robot Sails on The Breeze Like a Floating Dandelion
研究の要旨
刺激応答性ポリマーの台頭は、無線で制御される小型ソフトボディロボットのための豊富な材料をもたらしている。歩行、水泳、ジャンプなど、すでに合成システムで実証されている従来のロボットの移動能力を超えて、分散、滑空、ホバリングによる空中の飛行は、応答性材料がまだ開拓していないフロンティアであると考えられる。そのためには、アクチュエータの性能、軽量化、効果的な空気力学的設計が必要です。ここでは、光ビームの制御により風を利用して分散し、離着陸することができるソフトマターベースの多孔質構造体について報告します。タンポポの種子にヒントを得て、高空げき率、軽量、定常的な風の流れによる渦輪の分離生成といった生物模倣的な特徴を持つ構造を設計した。この人工種子は、光応答性液晶エラストマーからなるソフトアクチュエータを搭載しており、可視光励起により毛の開閉動作が可逆的に起こるという優れものである。この形状変形により、終端速度、抗力係数、飛散のための風の閾値を手動で調整することが可能です。また、光で制御された風による離着陸動作や、光で誘起された下降構造での局所的な集積が実証されています。この結果は、広い空中空間を受動的に航行する無線制御小型デバイスの新しいアプローチを提供するものである。